
Gerd Heinz
C-Programm für ATtiny13 unter AVR-STUDIO 4.19, Built 730 (2012)
Das Fahrwerk eines Modellflugzeugs (Mustang P51) sollte mittels Servo ausgefahren werden. Um es in ausgefahrener Stellung einzurasten, kommt es auf den allerletzten Millimeter an. Die Endlage muß mit viel Kraft arretiert werden. Nur wenn es einrastet, ist das Fahrwerk gegen ein Wegknicken bei der Landung gesichert.
Wenn aber ein Servo eine Endlage mit maximaler Kraft bedienen soll, so ist die Stromaufnahme des Servos hinderlich. Ein Servo kann durchbrennen, wenn es mechanisch dauernd gegen eine Endlage drückt. Auch wird der Akku schnell entleert.
Aufgrund von Toleranzen ist die Endlage aber nicht zuverlässig einstellbar. Was also kann man tun?
Man läßt das Servo voll gegen den Anschlag laufen. Nach 10 bis 20 Impulsen wird der steuernde Puls abgeschaltet (hier: abschalt = 18). Bei einer Framerate von 14 ms (Reflex Wheel Pro Lcd) geht das Servo dann nach 18 mal 14 ms = 252 Millisekunden in den Ruhezustand.
Die Pulslänge an Input-Pin PB3 wird geprüft. Übersteigt diese eine gewisse Größe (pulsschwelle = 1,7 ms), wird die Pulslänge am Ausgang PB4 von pulsmin = 0,9 ms auf pulsmax = 2,1 ms umgeschaltet. Nach einer viertel Sekunde wird der Ausgang PB4 abgeschaltet, wenn man davon ausgehen kann, daß alle modernen Servos bei fehlendem Servoimpuls in den Ruhezustand gehen.
Der Modul auf Basis AT13 besitzt je einen dreipoligen Servostecker und einen dreipoligen Stiftsockel. Er wird einfach zwischen Empfänger und Fahrwerk-Servo gesteckt.
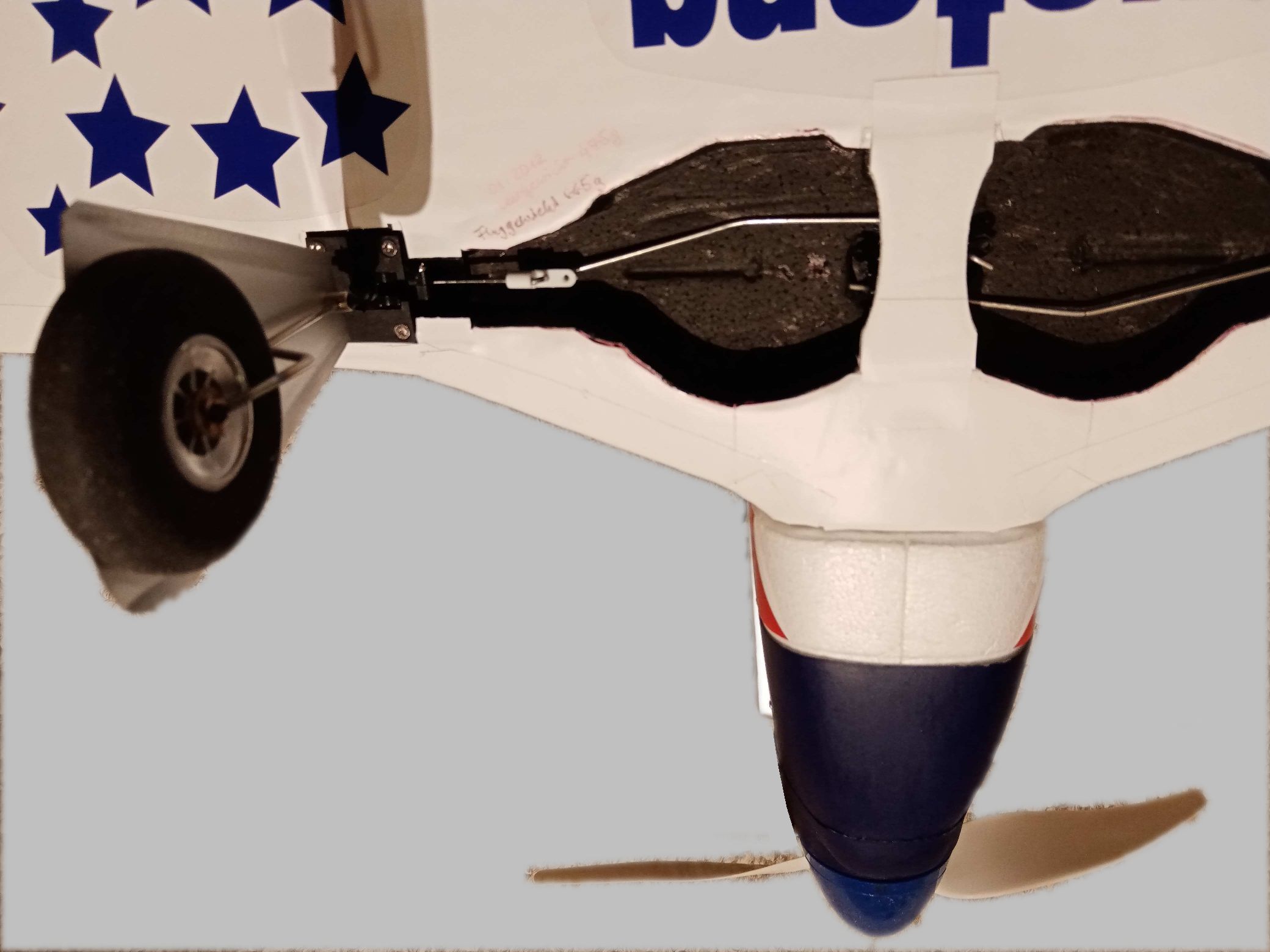
Bild 2: Blick ins Fahrwerk. Das Servo ist mittig unter der Verkleidung eingebaut.
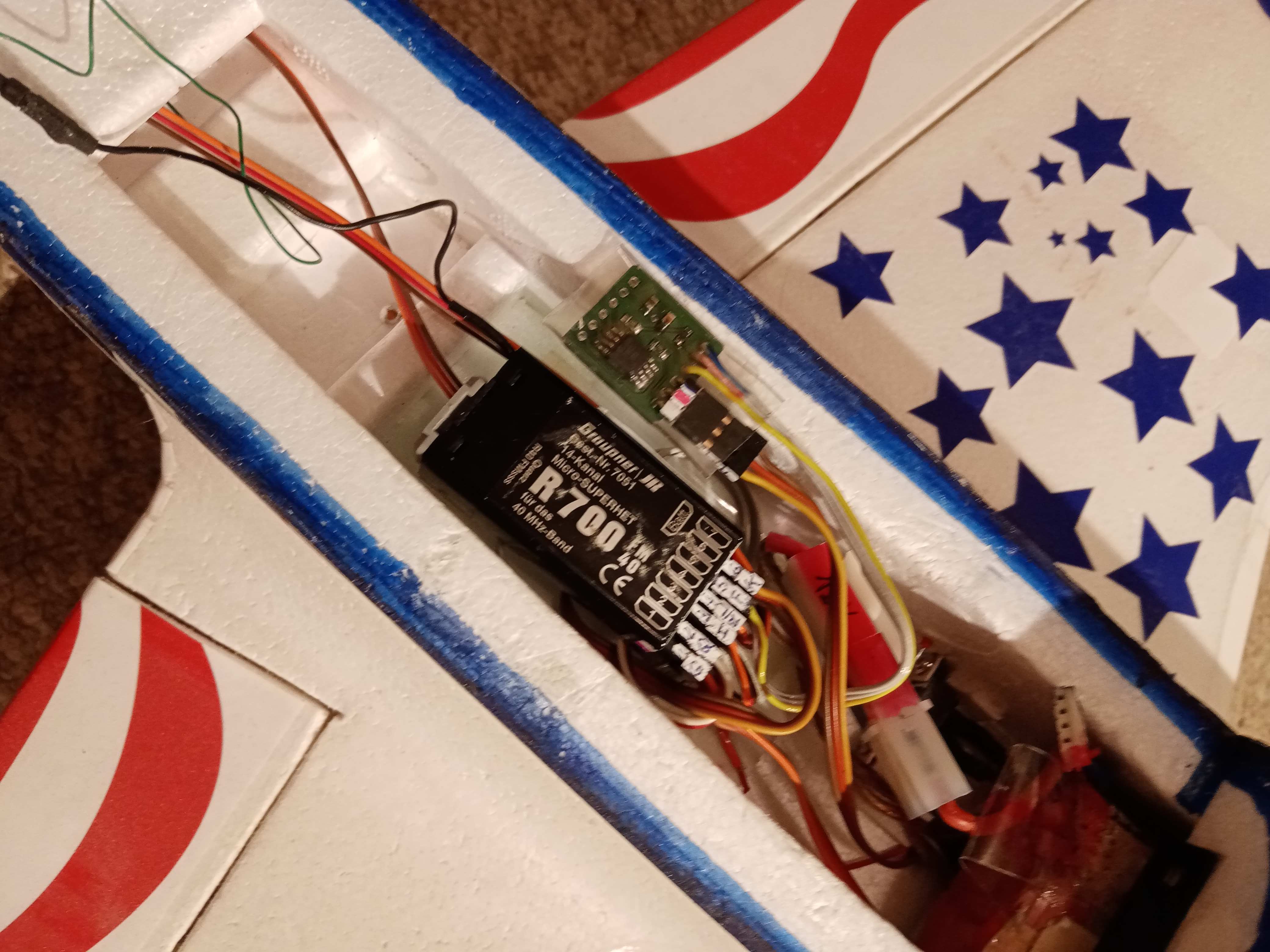
Bild 3: Bei abgenommener Kabinenhaube ist der Empfänger R700 und darüber die AT13-Platine zu erkennen.

Bild 4: Schaltplan des abgesägten AT13-Moduls
Bild 5: Layout der gekürzten AT13 Platine (BOT, TOP). Oben liegen Ein- und Ausgang (ST1), programmiert wird auf der anderen Seite des Boards (an BU2).
Sourcecode (pulstrg.c), Hexfile, Schaltung und Pulsdiagramme unter pulstrigger.zip
Kommentare, Hinweise oder Tips bitte an info@gheinz.de