nach oben
Link zum RC-V1-Renner
nach oben
Link zum RC-V1-Renner
Damals war's. Geschichten
aus dem alten Berlin.
Gerd Heinz
Ende der 1960-er Jahre kamen in der BRD ("im Westen") die ersten digital-proportionalen Funkfernsteuerungen in die Welt und auf den Markt. In der DDR lief man auf diesem Gebiet immer eine Gerätegeneration (etwa 5 Jahre) hinterher. Man baute neueste, westliche Geräte kreativ nach. Die DDR-Anlage "start dp5" (27 MHz, AM, 5 Kanäle, gegen 1975) kostete nach meiner Erinnerung komplett etwa 2400 Mark der DDR. Bei einem Jung-Ingenieursgehalt von 780 Mark, nach einem Jahr 860 Mark unbezahlbar, zumal noch die Wohnung mit Möbeln, Kühlschrank, Waschmaschine usw. einzurichten war. Die Bücher [1], [2] kamen genau zur richtigen Zeit auf den Markt.
Ein Jahr lang baute ich 1978 nach Feierabend eine "start dp5" Anlage nach. Ich arbeite damals als Entwickler im Institut für Nachrichtentechnik Berlin-Schöneweide, Edisonstr.63 (heute Leuchtenfabrik). Dank der Kollegen und HF-Spezialisten Dieter Buchwald, Herr Hochschild, Horst Schmied und Dr. sc. Eberhard Kühn [3] erhielt man nach einer schlaflosen Nacht meist den richtigen Tip, um weiterzukommen. Die hohe Verstärkung des ZF-Verstärkers des ersten Empfängers führte zunächst zu andauernder Rückkopplung. Die aber hatte Ursachen. Auch der Senderabgleich hatte es in sich. Und die Stabilität der Regelelektronik der Servos brachte neue Herausforderungen. gh
Wenn ich mich richtig erinnere, wurden in Westdeutschland anfang der 70er Jahre von Graupner erste digitale proportional-Funkfernsteuerungen [2] verkauft, siehe auch [4], [5] und [6].
Vorher gab es nur Tip-Fernsteuerungen (Tonkreisanlagen), die zwar für Segelflugzeuge und Schiffe, nicht aber für schnelle Automodelle oder für Kunstflieger geeignet waren. Jede Taste erzeugte einen eigenen Sinuston, der von einem LC-Kreis im Empfänger ausgewertet wurde. Relaisanker oder spezielle Rudermaschinen betätigten die Ruder, beim Drücken einer Taste schlug das entsprechende Ruder aus.
Tip-Empfänger waren in der Anfangszeit des RC-Modellbaus (RC steht für Radio-Control) bedeutsam, weil sie mit wenigen, damals noch sehr teuren Transistoren auskamen. Ein Transistor kostete Mitte der Sechziger in der DDR noch um die 20 Ost-Mark. In der Schaltungstechnik wurde auf die seit den dreißiger Jahren vorhandenen, ersten Schaltungen mit Röhren zurückgegriffen.
So soll schon die A4-Rakete von Wernher von Braun mit einer röhrenbestückten 1-Bit Fernsteuerung über einen Radar-Sender gesteuert worden sein, deutsche Fliegerbomben wurden ferngesteuert auf Schiffsziele gelenkt. Nach dem Krieg übernahm die USA die führende Rolle, siehe z.B. ein Diskussionsforum in [6].
Nicola Tesla führte bereits 1898 auf der Weltausstellung in New York ein funkferngesteuertes Modellboot vor [4] - lange, bevor Elektronenröhre oder Transistor erfunden wurden. Und Werner von Siemens soll bereits 1870 eine funktionierende Drahtfernsteuerung gezeigt haben [3].
Meine erste Drahtfernsteuerung bestand in der 8. Klasse (1968) aus einem (Stabilbaukasten-) Dreirad, dessen zwei Motoren die zwei Vorderrräder trieben. Das dritte Rad lief passiv nach und pendelte frei. Die Motoren waren über ein Kabel aus drei Drähten mit dem Sender verbunden. Der Sender bestand aus einem astabilen Multivibrator, dessen Tastverhältnis verändert werden konnte, mit einem Relais, an dessen Arbeitskontakt der eine und an dessen Ruhekontakt der andere Motor angeschlossen war. Den Motorstrom stellte ein Modellbahntrafo mit Gleichrichter zur Verfügung. Mit dem Modellbahntrafo konnte man vorwärts und rückwärts fahren oder halten, während man am Poti des batteriebetriebenen Multivibrators die Fahrtrichtung einstellte. Nun sie ahnen es: Die Anlage war noch nicht wirklich praxistauglich, aber man konnte das Dreirad gezielt bewegen.
Meine erste Funkfernsteuerung war gegen 1970 eine 4-Tasten Tipp-Anlage - mit unsicherem Pendelaudion als Empfänger, dicken Ferritkernen für die Tonfrequenzselektion und Postrelais-Spulen als Ruderantrieb. Die Schaltung einer handelsüblichen Tip-Anlage wurde nachgebaut. Das Pendelaudion hat leider nie ausreichend zuverlässig funktioniert. Es fing zuviele Störungen ein. Als Schüler wußte ich nicht weiter. Auch waren die Postrelais nicht wirklich geeignet, um die benötigten Lenkkräfte aufzubringen. Die Anlage verschwand im Müll, den 27 MHz Quarz des Senders (mit Aufdruck 27,12 MHz ohne Kanalnummer) fand ich beim Aufräumen wieder.
Und vor den Tipp-Anlagen baute man mit Leidenschaft programmgesteuerte Modelle. Dazu schloß man irgendein Spielzeuggetriebe an einen kleinen Elektromotor an, welches eine Kurvenscheibe langsam drehte. Gegen die Kurvenscheibe drückte ein Schleifer, der mit dem Steuerruder des Schiffsmodells verbunden war. Ich erinnere mich noch an einen Wettkampf in den 60ern am Alexanderplatz. In einem rechteckigen Becken eines Springbrunnens befanden sich vier Düsen in einer Reihe als Hindernisse. Das Boot hatte die Aufgabe, im Zickzack um die Düsen herumzufahren und zum Startplatz zurückzukehren. Da war extreme Präzision gefragt.
Mit kleiner und billiger werdenden Transistoren wurde alles anders. Ein noch immer unbekanntes Genie erfand das digital-proportionale Steuerungsprinzip. Damit konnte nun jede Ruderbewegung gleitend gesteuert werden. Obwohl in den nächsten 50 Jahren aber Millionen Digital-Proportional-Fernsteueruungen gebaut wurden, blieb der Erfinder unbekannt. Ein trauriges Kapitel für den menschlichen Erfindergeist. Sollte es doch die Basis der Fernsteuertechnik bis heute bleiben. Deutsche Pioniere bei den ersten digitalen Proportionalanlagen Ende der 60er Jahre waren wohl die Firmen Graupner und Metz [2].
Das Prinzip einer Digital-Proportional-Anlage soll mit dem Bild 1, welches 2007 für Wikipedia erstellt wurde [8], kurz erklärt werden.
Ein astabiler Multivibrator erzeugt den Grundtakt. Je nach Anlage werden die Pulse alle 12 bis 22 Millisekunden zyklisch wiederholt.
Mit dem Potentiometer des betrachteten Kanals wird am Sender die Pulsdauer eines Monoflops typisch von 1 bis 2 Millisekunden (ms) variiert. Eine Millisekunde steht nun z.B. für links, zwei Millisekunden für rechts, 1,5 ms für neutral (Mitte).
Jeder Folgekanal (-Impuls) schließt sich unmittelbar an seinen Vorgänger an. Das erste Monoflop löst aus für Kanal 1. Die weiteren Monoflops lösen nacheinander aus für Kanäle 2, 3 und 4. Jedes auslösende Monoflop erzeugt einen Puls. Diese werden zusammengeführt und als Pulsfolge mit Pulsbreiten von 0,25 bis 0,4 ms versandt.
AM stellt die Amplitudenmodulation des HF-Trägers (27/35/40 MHz) dar, dabei tasten (schalten) die verlängerten Pulse den Sender aus. Bei Frequenzmodulation (FM) wird die Trägerfrequenz verändert, hier ist die Frequenzdifferenz rund |f1−f2| ≈ 5 kHz.

Im Empfänger werden die Pulse der verschiedenen Kanäle wieder vereinzelt und zu den Servo-Steckern gegeben. Die Pulsfolge wird mittels Ringzähler oder Schieberegister dekodiert, so daß jede Servoelektronik nur die Pulsbreite des betreffenden Kanals erhält.
Kernelement jeder Servoelektronik ist ein Monoflop, welches über die eingehende Pulsflanke des Senders angestoßen wird und dessen Pulsbreite von der Stellung des im Servo integrierten Potentiometers gesteuert wird.
Die vom Sender eingehende Pulsbreite wird von der vom Servopoti gelieferten Pulsbreite subtrahiert, das positive oder negative Ergebnis läßt den Servomotor in die eine oder andere Richtung loslaufen, solange, bis die Pulsdifferenz Null wird. Hier ist die beabsichtigte Ruderstellung erreicht und der Servomotor stoppt.
Ursprünglich nutzten die verschiedenen Hersteller verschiedene Neutralzeiten (1,5 ms ... 1,8 ms). Letztlich normten die Servohersteller den Markt. Heute sind bei allen Servos relativ einheitlich 1,5 ms +/- 0,5 ms bei einem Stellwinkel von +/- 45° zu erwarten.
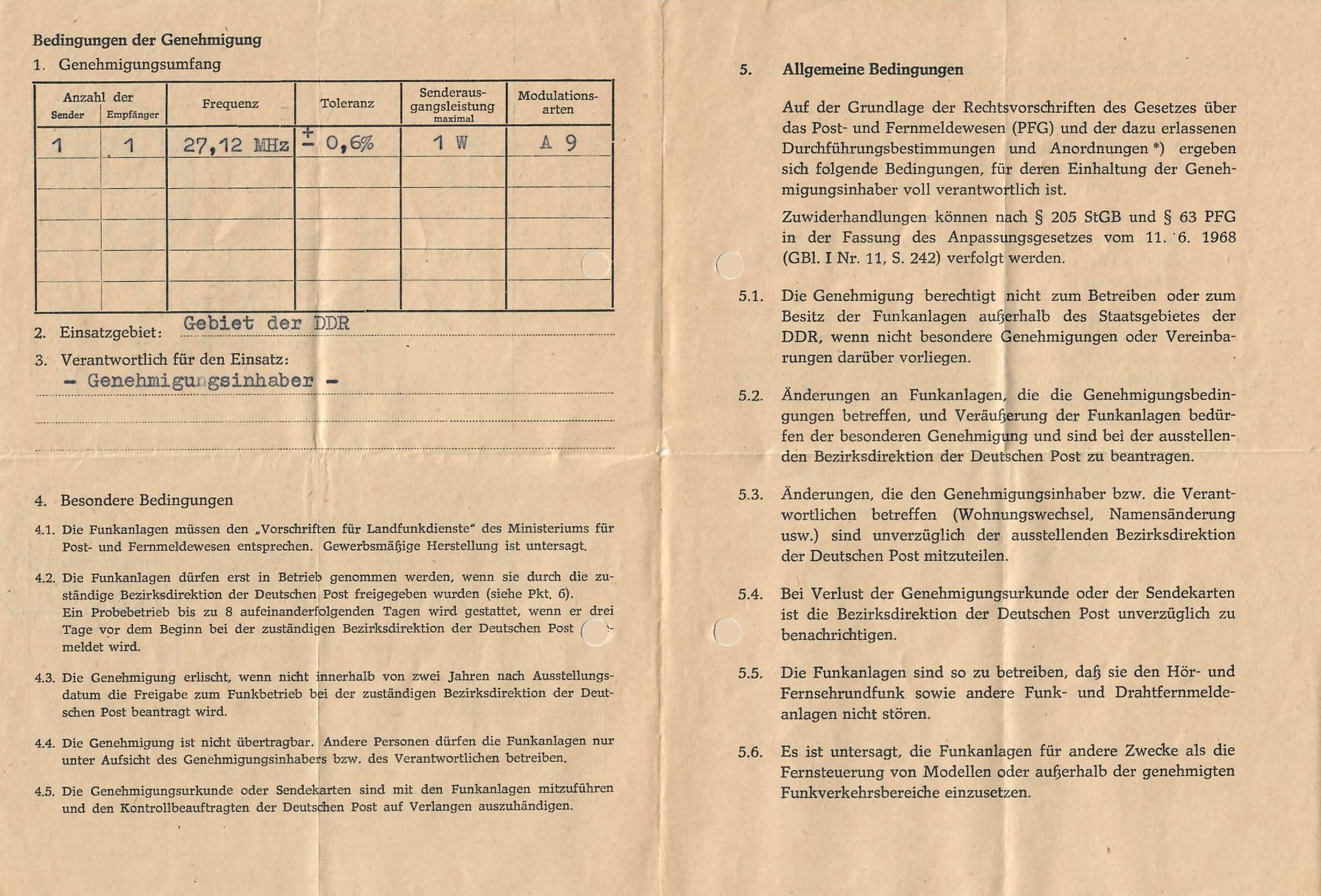
Erste Proportionalanlagen arbeiteten mit Amplitudenmodulation (AM) auf dem 27-MHz-Band, die Endstufe des Senders wurde pulsierend ein- und ausgeschaltet. Das 27-MHz-Band ist aufgeteilt in 32 Kanäle in einem Abstand von 10 kHz. Es gab große Sendequarze sowie kleine Empfangsquarze mit einer Frequenzdifferenz von 455 kHz.
Favorisiert waren von den 32 Kanälen nur 12 Kanäle in größerem Frequenzabstand (Kanäle 2,4,7,9,12,14,17,19,22,24,27,30), nur für diese waren Quarzpaare (TX/RX) erhältlich.
Man teilte sich das 27-MHz-Band mit Sprechfunk (Walkie-Talkies), der bei Polizei und Rettungsdiensten verwendet wurde. Problem bei AM sind die Pulspausen, die von einem störenden Sender "zugedrückt" werden können.
Entsprechend war deren Störsicherheit nicht allzu hoch. Wehe, bei einem Wettkampf fuhr ein funkender Krankenwagen, Feuerwehrwagen oder ein Polizeiwagen nahe genug vorbei. Dann wurde es für die sich am Kurs drängenden Zuschauer kreuzgefährlich, weil mit hoher Geschwindigkeit fahrende Modelle ausbrechen konnten. Die vorn Stehenden sprangen zwar hoch, aber der Wagen krachte irgendjemandem weiter hinten in die Beine. Schnell kamen um den Kurs gelegte, mit Wasser gefüllte Feuerwehrschläuche in Mode, um genau das zu verhindern.
Zur Erhöhung der Störsicherheit ging man zu Frequenzmodulation (FM) und auf andere Frequenzbänder über. Mit der Anlage "Multiplex Royal-FM" (27, 35 und 40 MHz) ging man wohl 1975 erstmals diesen Weg [2], Seite 339. Ein FM-Sender arbeitet mit Dauerstrich-Modulation, über eine Kapazitätsdiode wird die Quarzfrequenz entsprechend des Pulsmusters variiert. Um das durch AM-Anlagen bereits vorgegebene Kanalraster mit einem theoretischen Kanalabstand von 10 kHz realisieren zu können, ist ein HF- Frequenzhub kleiner 5 kHz zu realisieren. Im Empfänger ist der Demodulator entsprechend zu modifizieren.
Mit der Entwicklung von Transistoren mit immer höherer Transitfrequenz, die für Tuner für das zweite Programm des Fernsehens entwickelt wurden (man denke an den Transistor AF139), entstanden Voraussetzungen für den Übergang zu höheren Sendefrequenzen. So ging es über das 35 und 40 MHz-Band zu 433 MHz und etwa ab 2010 schließlich zu 2,4 GHz. Vorteil höherer Frequenzen war eine kürzer werdende Antennenlänge.
1974 stellte die Firma Histrie-Electric die erste Fernsteuerung "Superprop" für 433 MHz vor. Damit konnte die Antennenlänge deutlich reduziert werden [2], Seite 329. Interessant ist bei der Superprop eine 5/8 λ lange Stabantenne (41 cm) mit der sich eine stärkere Bodenwelle erreichen läßt.
Als Lösungsweg wurde für 433 MHz (nicht bei Superprop, [2], Seite 329) i.a. die Sendefrequenz von 27,12 MHz versechzehnfacht, da für 27 MHz bereits Quarzpaare marktüblich waren. So ergibt 16 mal 27,12 MHz die Zielfrequenz von 433,92 MHz. Die Versechzehnfachung der Sendefrequenz ließ sich als 4x4 oder als 2x2x2x2 oder in Kombination ausführen.
Letztlich kam man zur Jahrtausendwende bei 2,4 GHz an, neuere Fernsteueranlagen nutzen nur noch dieses Band. Die nunmehr extrem kurze Antennenlänge von nur 3 Zentimetern ist zugleich ein Vorteil, wie ein Nachteil, da sie temporär starke Phasenauslöschungen zwischen direkter Welle und am Boden reflektierter Welle bewirken kann. Hier werden die Pulsbreiten jedes Kanals meist als Datenwerte übermittelt. Allerdings blieb die Servo-Schnittstelle mit Pulsbreitenmodulation unverändert.
Allerdings steht eine vergleichbar viel höhere Nutzbandbreite zur Verfügung, die mühelos auch lange, chiffrierte Binärcodes zuläßt. Frequenzhopping (FHSS) tut ein übriges.
Da im Modellbau ausschließlich Stabantennen Verwendung finden, ist deren Fußpunktimpedanz von 35 Ω bei einem Viertel der Wellenlänge (λ/4) substanziell.
Mit λ = c/f , wobei c für die Lichtgeschwindigkeit (300.000 km/s) und f für die Sendefrequenz stehen mögen, erhalten wir die folgende Tabelle:
Tabelle 1: Antennenlänge in Abhängigkeit von der Sendefrequenz
| Sendefrequenz f in MHz | 27 | 40 | 433 | 2400 |
| Wellenlänge λ in m | 11,06 | 7,5 | 0,69 | 0,125 |
| Antennenlänge λ/4 in cm | 277 | 188 | 17 | 3,1 |
Während man bei 27 MHz noch Antennen-Verlängerungsspulen brauchte, um mit einigermaßen kurzen (1,40 m bis 1,80 m) Sendeantennen zurecht zu kommen, entfällt dieses Problem ab 433 MHz aufwärts vollständig. Im einfachsten Fall bestand bei 27 MHz die Verlängerungsspule aus einem dicken Kupferlackdraht, der die fehlende Länge zur Viertel-Wellenlänge hatte und als Luftspule in Reihe zur Antenne geschaltet wurde.
Skalierte Mikroelektronik-Technologien erschlossen den Gigahertzbereich. Einchip-Microcontroller mit internem EEPROM sowie Synthesizer- und PLL- Schaltungen aus Bluetooth- und WLAN-Entwicklungen gestatteten nach der Jahrtausendwende quarzlose Empfänger sowie höchste Störsicherheit durch variierende "Frequency Hopping Spread Spectrum" (FHSS) Verfahren auf 2,4 GHz "on chip". Das waren Quantensprünge.
Aber ein Wermutstropfen dieser neuen Techniken darf nicht verschwiegen werden. Sender und Empfänger verschiedener Hersteller sind nicht mehr kompatibel, selbst neue Gerätegenerationen desselben Herstellers können meist nicht mit den älteren Geräten kommunizieren.
Wird ein neuer FHSS-Hopping-Code als Software geladen, ist schon Inkompatibilität mir dem vorherigen erreicht. Da von jedem Modellbauer alle paar Jahre alles neu gekauft werden muß, kann extrem viel mehr Elektronik-Sondermüll produziert werden. Die Umsätze der Hersteller indes steigen.
Die Möglichkeit, 1978 eine Fernsteueranlage zu kaufen war für mich finanziell ausgeschlossen. Als Jungingenieur verdiente ich 860 Mark, eine "start dp5" Anlage kostete mit Servos komplett um die 2400 Mark (der DDR). Als Absolvent mußte man sich erst einmal Kühlschrank, Waschmaschine und Möbel kaufen.
Nun konnte man zur GST (Gesellschaft für Sport und Technik) gehen, um sich in einem Modellbauclub in eine lange Reihe Wartender einzureihen, die ebenfalls noch keine Funkfernsteuerung besaßen. In der Zwischenzeit hatte man natürlich an Vereinsveranstaltungen aller Art - insbesondere auch zur vormilitärischen Ausbildung teilzunehmen. Auch erhielt man das GST-Material nur als Leihgabe.
Das war nicht nach meinem Geschmack. Also blieb nur ein Eigenbau übrig, zumal die Arbeitskollegen im INT - als versierte HF-Spezialisten - dazu ermutigten. Ich saß von 1977 bis 1980 in der Arbeitsgruppe von Dr. Eberhard Kühn und Horst Schmied, den DDR-Bestsellerautoren [3]. Die Kollegen vermaßen insbesondere TTL-Schaltkreise für grenzwertige Applikationen. Ein bissel Glück gehört im Leben immer dazu.
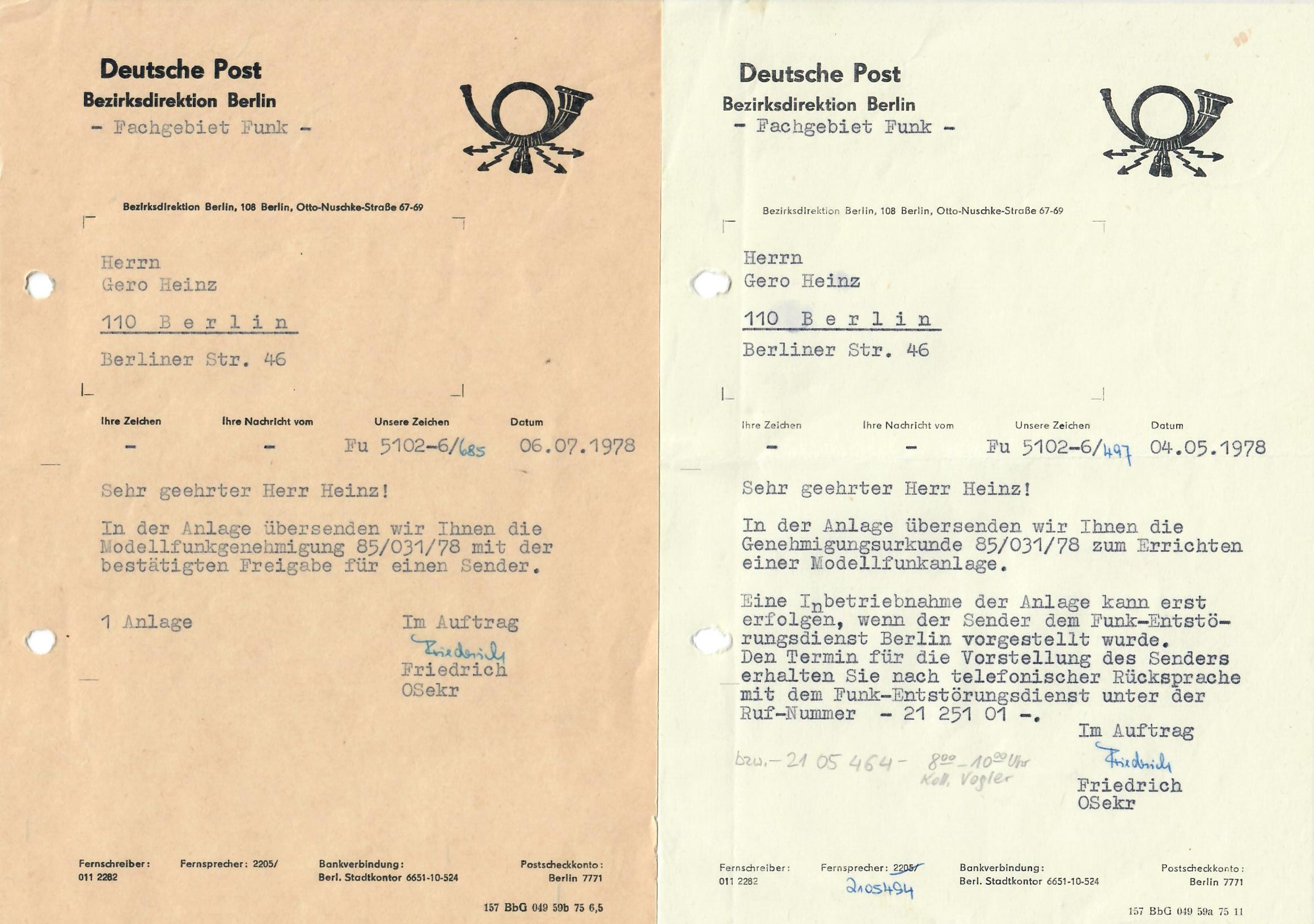
Nun könnten Sie fragen: Wozu erzählt er das? Es ist ganz einfach: Ich habe niemanden kennengelernt, der ein Wettbewerbsmodell mit einer selbstgebauten Funkanlage betrieb, die noch dazu eine Postzulassung brauchte und hatte.
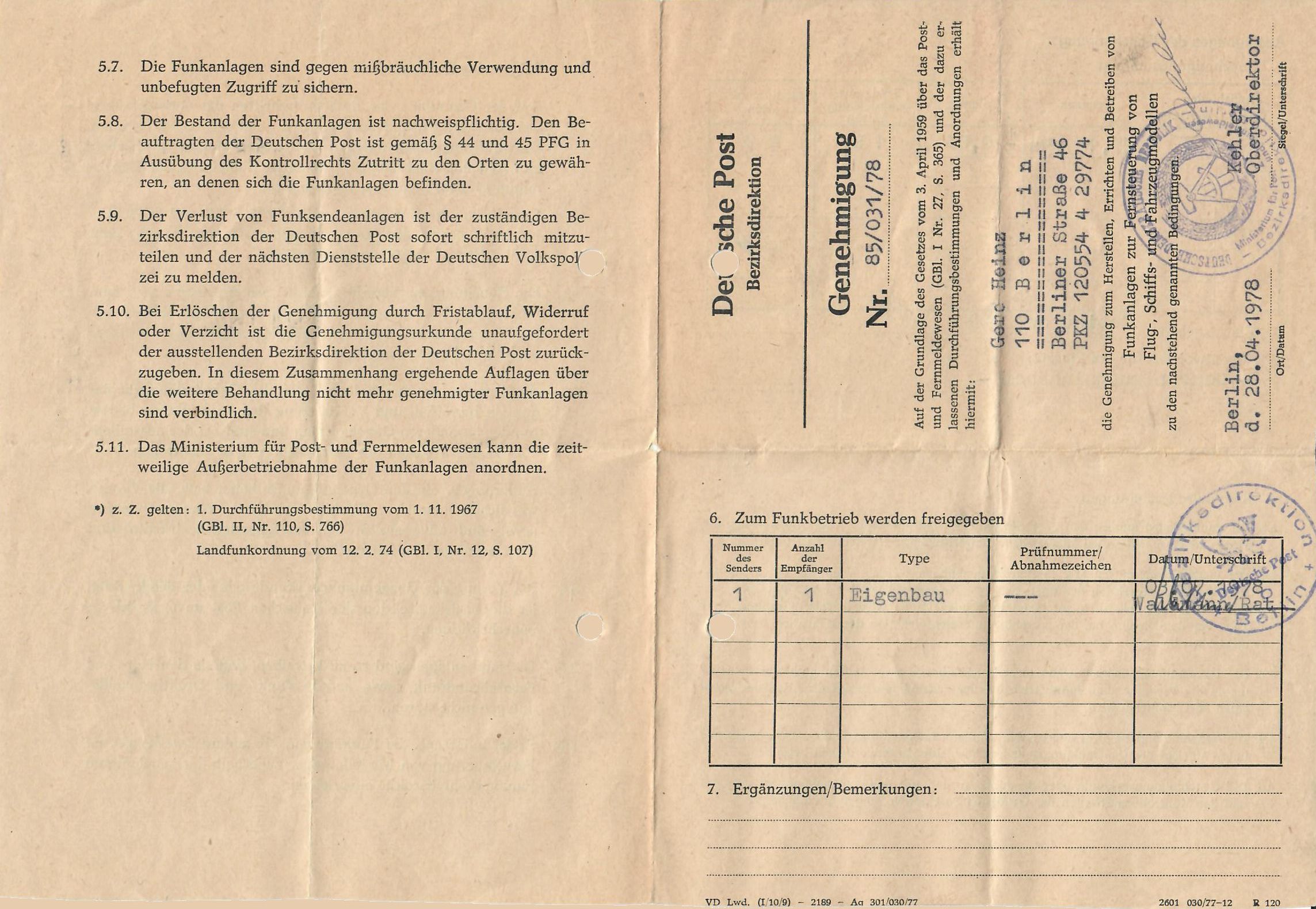
Diese Zulassung gab es nicht gratis. Man hatte die Anlage beim Funk-Entstörungsdienst der Post in einem abgeschirmten Raum aufzubauen, dort interessierte man sich insbesondere für die maximale Leistung und für Nebenkeulen - also die Störfrequenzen, die in Nachbarbänder einstrahlen.
Auf dem Spektrometer hatten die Abstrahlungen des Funksenders exakt innerhalb einer Schablone zu liegen. Beim ersten Versuch durfte ich wieder nach Hause gehen, die Nebenkkeulen waren zu hoch. Erst beim zweiten Anlauf lag der Sender innerhalb des erlaubten Limits. Ich war stolz wie Bolle!
Der Funk-Entstörungsdienst befand sich übrigens im Neubau gegenüber dem HdjT (Haus der jungen Talente, heute wieder Palais Podewil) in der Klosterstraße am Alex, während die Bezirksdirektion der Deutschen Post in der Otto Nuschke Str. 67-69 saß (heute wieder Jägerstraße).
Sämtliche Platinen wurden zunächst auf Pergamentpapier im Maßstab 1:1 gezeichnet. Dann wurden die Löcher auf gereinigtes Leiterplattenmaterial passender Größe mit einer Zirkelspitze übertragen. Mit einem Skribent wurden anschließend die Leiterzüge auf die Platine übertragen. Zum Schluß wurde mit Eisen-3-Chlorid geätzt und die Löcher wurden gebohrt.
Aus dem Motor einer defekten Laugenpumpe einer Waschmaschine wurde dazu eine Leiterplatten-Bohrmaschine gebaut, die in den Bohrständer einer Multimax (erste DDR-Handbohrmaschine) eingespannt werden konnte.
Damals gab es eine nach dem Trocknen wasser- und säurefeste Ausziehtusche Karmin-Rot (von Barock, ZAK 1497142 109 062083, MSL 57 841 173, im Behälter von 10 Gramm zu 0,62 Mark), die bestens geeignet war, weil sich der Skribent nach Gebrauch mit Wasser wieder auswaschen ließ.
Die Empfänger-Akkus bereiteten zur damaligen Zeit noch große Schwierigkeiten. Ich konnte irgendwo zwei Blöcke mit je vier Silberzellen erhalten, das waren Knopfzellen mit etwa 40 mm Durchmesser und etwa 10 mm Dicke. Vermutlich handelte es sich um Silber-Zink-Zellen. Sie hatten je 450 mAh. Mit dieser geringen Kapazität würde heute niemand mehr in einen Wettkampf gehen. Damals mußte es ausreichen.
Zum Starten des Verbrennungsmotors (Zweitakt-Diesel mit Methanol und 20% Rizinusöl) brauchte man für die Glühkerze eine starke Akkuzelle (1,2...2V, 4A; NiCd oder Blei). Ein väterlicher Freund schenkte mir einen zehn Jahre alten NiCd-Akku der Deutschen Post mit 1,2 Volt und 10 Ah im Format von etwa 120x70x70 mm. Dieser war noch bis zum Ende der 80er Jahre im Einsatz.
Schon als Schüler der 8. Klasse flog ich mit einem Eigenbau-Fesselflugmodell auf dem Sportplatz der 13. Oberschule Berlin-Heinersdorf im Kreis. Damals noch mit einem 2 cm³ Jena-II Selbstzünder (ohne Glühkerze). Der liebenswürdige Nachbar, der Waffenschmied und Rüstmeister an der Volksbühne, Horst Knäfel, hatte ihn ausgemustert und mir geschenkt. Er war selbst leidenschaftlicher Modellbauer.
Und wo bekam man für den Selbstzünder Äther, Methanol und Rizinusöl her? Natürlich aus der Drogerie oder Apotheke. Heute undenkbar, daß ein 13 Jahre alter Stift in die Apotheke geht, um einen halben Liter Äther und einen Liter Methanol zu kaufen! Damals war das selbstverständlich. Man wurde lediglich gefragt, wofür man das brauche und wer die Eltern seien. Es war eine Zeit, in der der Begriff der "Moral" noch bekannt war und eine Bedeutung hatte.
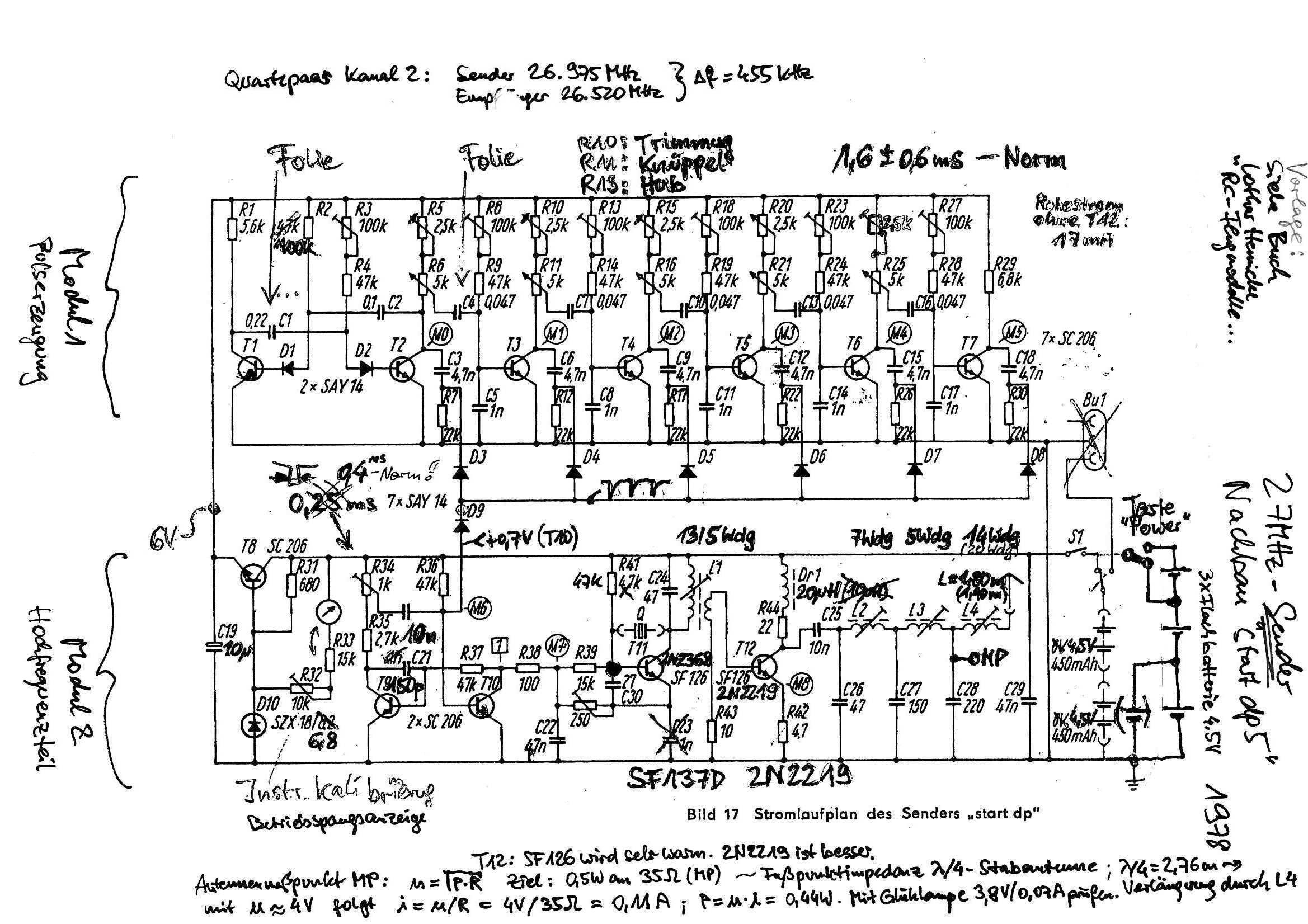
war bis auf die Mechanik ein fast originaler Nachbau des "start dp5" Senders (Hersteller: PGH Radio-Fernsehen, 92 Freiberg, Bahnhofstr. 44-48, DDR) mit 5-Kanälen, die Sendeleistung betrug etwa 500 mW. Wie das Vorbild arbeitete er mit Amplitudenmodulation (AM).
Zur Spannungsversorgung dienten drei Flachbatterien mit je 4,5 Volt. Im Fall eines Empfangsausfalls konnte man mit einer Power-Taste die Betriebsspannung von 9 Volt auf 13,5 Volt erhöhen. Sender und Empfänger sind quarzstabilisiert mit einer Frequenzdifferenz (ZF) von 455 kHz.

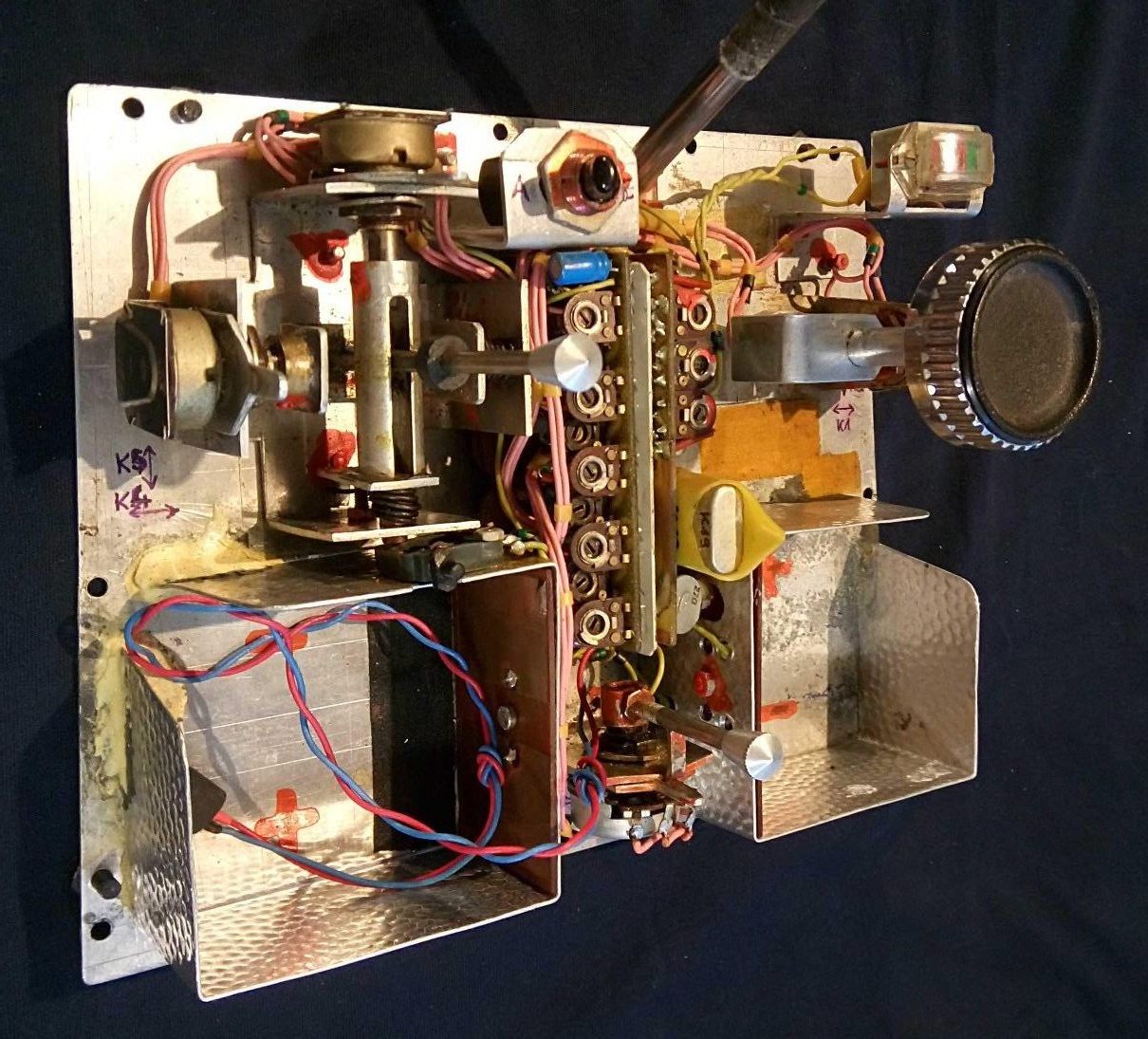

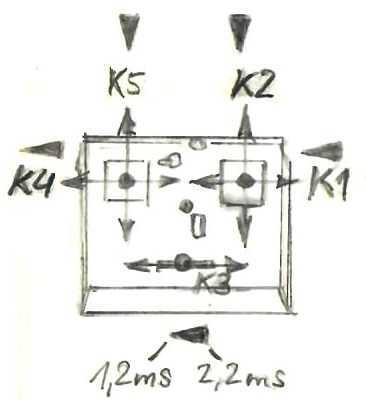
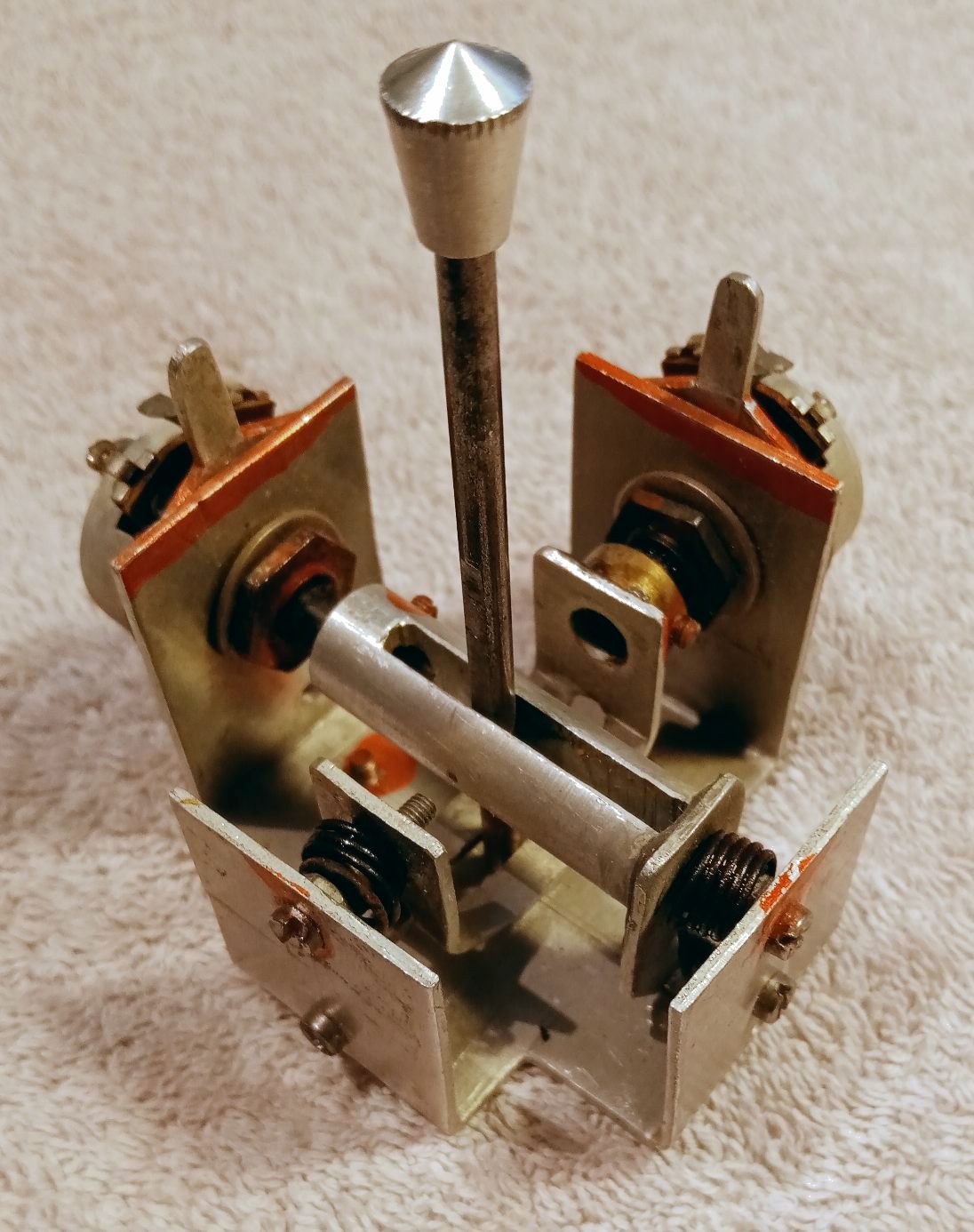
Bild 3a: Sender als Nachbau des "start dp5", Stand 1980. Sämtliche Gehäuseteile, aber auch die Steuerknüppelmechanik und die Batteriefächer waren aus Aluminium handgefertigt, Aluminiumteile wurden gelötet. Letzte Reihe: Poti-Zuordnung, Kanalzuordnung, Steuerknüppel.
Die Nuten der Steuerknüppel wurden per Hand gesägt und gefeilt. Federn zur Rückstellung auf die Neutrallage wurden selbst gewickelt. Mit dieser Fernsteuerung wurde zunächst ein Wasserflugzeug betrieben.
Mit der Verwendung des Senders für den Ferrari entstanden neue Anforderungen. Knüppelsteuerung ist bei Modellrennwagen zu unpräzise. Um die Bedienung des Modellautos zu erleichtern, wurde der Kreuzknüppel rechts ersetzt.
Ein einhändig bedienbarer Steuermechanismus mit einem Lenkrad wurde entwickelt, siehe Bild 3a ganz oben. Zum Gasgeben/Bremsen läßt sich das Lenkrad nach vorn und hinten schwenken (Kanal K2), gelenkt wird durch Drehen am Lenkrad mit Kanal K1.
Die Elektronik ist zweigeteilt in eine NF- und eine HF-Platine. Mit den Induktivitäten L1 bis L4 wurde der Sender auf Maximalleistung bei 27 MHz abgestimmt. L4 ist die Antennenverlängerungsspule.
Einiges Kopfzerbrechen bereitete der Senderabgleich. Zuhause stand kein hinreichend abgeschirmtes Spannungsmeßgerät mit Metallgehäuse zur Verfügung. Mit damaligen Universalvoltmetern mit Drehspulinstrument war es trotz vorgeschaltetem, schnellen Spitzenwertdedektor praktisch unmöglich, die HF-Ausgangsleistung zu messen.
Schloß man das Voltmeter an, zeigte es z.B. drei Volt an. Löste sich durch Zufall eine der beiden Verbindungen (zur Antenne oder zur Masse), schlug der Zeiger auf Vollanschlag aus. Man war verwirrt.
Als zuverlässig erwies sich letztlich ein Lämpchen 3,8V / 0,07A parallel zu einem 100 Ω Widerstand, das mit kurzen Drähten zwischen Meßpunkt MP und Masse gelegt wird. Damit wird der Fußpunktwiderstand der Antenne von 35 Ω simuliert. Bei einer Sendeleistung von 500 mW muß es mit einem Effektivwert von 4,2 Volt hell leuchten.
Auf diese Weise ließ sich allerdings nicht die Antennenverlängerung L4 abgleichen. Hierfür war eine Ersatzimpedanz der exakten Antennenlänge zu bestimmen und nachzubauen. Leider sind dazu keine Unterlagen mehr vorhanden.
Im Institut waren Meßgeräte aller Art zwar vorhanden, jedoch wurden Privatarbeiten nicht gern gesehen. Dort konnte lediglich nach Dienstschluß ein 100-MHz-Oszilloskop oder ein Spektrometer (Spezialoszilloskop) genutzt werden, um die Nebenkeulen zu prüfen und den Feinabgleich durchzuführen.
Bild 3b: Sender nach der Restaurierung. Der Postaufkleber wurde vor Neulackierung abgedeckt. Darauf ist zu lesen: DP FuED/B Berlin, Datum: 28.4.78.
Gesteuert wurde das Automodell mit K1 und K2. K1 war als Lenkradknopf ausgeführt, welchen man nach vorn und hinten schwenken konnte, um K2 zu stellen (Gas/Bremse). So hatte man mit der rechten Hand alles unter Kontrolle und man konnte mit der linken den Sender festhalten.
Der erste Empfänger entstand 1978 als AM-Super (Super-Herterodyn-Empfänger). Auch er war ein originaler dp5-Nachbau. Der Oszillator war quarzstabilisiert mit einer Zwischenfrequenz (ZF) von 455 kHz, die mit drei Mikki-Filtern (Taschenradio Mikki, Hersteller Stern-Radio Berlin) selektiert wurde. Der Empfänger arbeitete diskret und vollkommen ohne ICs. Mit fünf Kanälen paßte er zum Sender.

Man erkennt kleine Änderungen im Schaltplan. Eine Besonderheit des Empfängers besteht in der an der Basis von T3 geregelten ZF-Verstärkung. Ein diskret aufgebauter Ringzähler (T11 bis T20) dient als Schieberegister zur Pulsdekodierung.
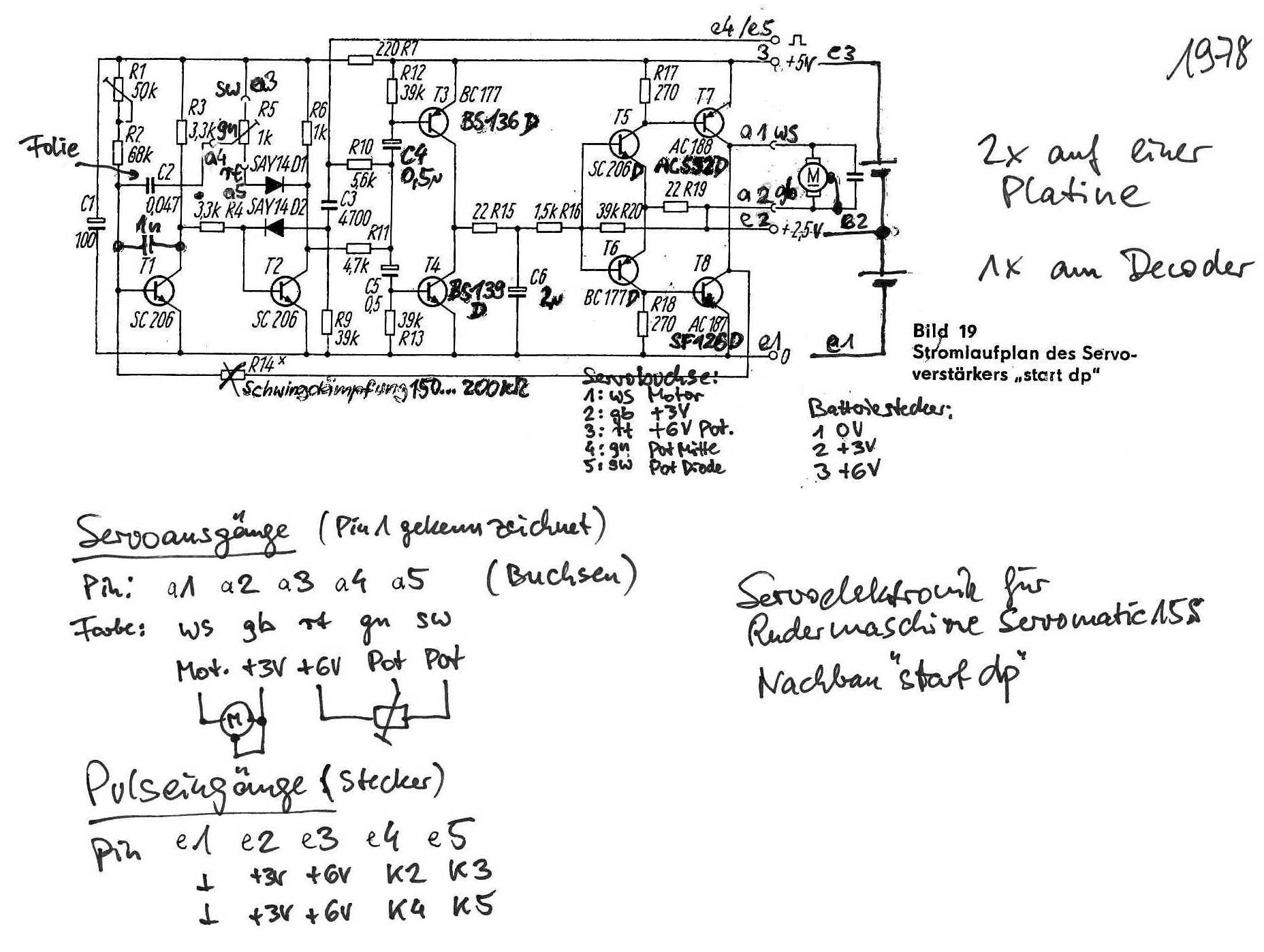
Die Servoelektronik ist ebenfalls diskret aufgebaut ohne IC. Um teure Transistoren und Platz zu sparen, wurde hier noch mit geteilter Mittenspannung von 2x 3 Volt gearbeitet.
In vier getrennten Boxen befanden sich Empfänger, Pulsdekoder mit einer Servoelektronik sowie zwei Boxen mit je zwei Servoelektroniken.
Als erstes wurde damit ein Wasserflugzeug ausgerüstet. Es erwies sich als Fehlkonstruktion. Die Abrißkante lag etwas zu weit hinten. Man mußte bei Vollgas das Höhenruder ziehen, um es auf die Abrißkante zu bekommen. Dann erhob sich das Flugzeug kurz aus dem Wasser, nur um soviel Geschwindigkeit zu verlieren, daß es sofort wieder ins Wasser platschte. Auch war die Gelegenheit, an einen See zu kommen, ohne PKW eher sehr begrenzt (ich bestellte mit 18 Jahren meinen ersten Trabant und bekam ihn im Alter von 30).
Nach dem Wasserflugzeug wurde mit einem neuen Projekt begonnen, dem Ferrari.
Im Modell des RC-V1 Ferrari waren für zwei Kanäle drei Boxen unterzubringen: 1) der Empfänger, 2) der Ringzähler mit einer Servoelektronik und 3) eine Box mit zwei Servo-Elektroniken.
Obwohl mit diesem erste Rennen gefahren wurden, war die Lösung unpraktisch, leicht konnte man ein Kabel abreißen. Auch war der Platz für die drei Kistchen sehr eng bemessen. Sie wurden übrigens mit selbstgebauten Formen aus Cama-Margarine-Schachteln im Backofen tiefgezogen.
Auch Stellkraft und Geschwindigkeit der Servos ließ Wünsche offen.

Die originale Start-dp5 nutzte große Diodenbuchsen und Stecker. Um Bauvolumen einzusparen, wurden bei diesem ersten Empfänger aus DIL-IC-Fassungen kleinere Stecker und Buchsen gesägt und gefeilt.
Probleme gab es bei der Inbetriebnahme des Empfängers. Egal was man machte, der ZF-Verstärker hatte maximale Rückkopplung. Nach endlosem Suchen wurde ein erster Fehler gefunden. Aus Platzgründen war C1 an Masse auf der gegenüber liegenden Seite der Leiterplatte angeschlossen worden. In der Masseleitung lagen damit 4 Zentimeter Leitbahn, an die alle anderen Schaltungsteile angeschlossen waren. Nach Korrektur änderte sich das Schwingungsbild, aber noch immer schwang der ZF-Verstärker.
Es kostete weitere Wochenenden, bis sich unser HF-Experte, Kollege Dieter Buchwald die Schaltung anschaute und darauf hinwies, daß eine direkte Ankopplung der Transistor-Basis an den Filter eine Resonanz zwischen der Induktivität des Filters und der Basis-Emitter oder Basis-Kollektor-Transistorkapazität bewirken könnte.
Ich möge doch mal einen 100 Ω Widerstand zwischen Filterausgang und Basis schalten. Schaltungstechnisch erschien das zwar wenig plausibel, aber die Hoffnung stirbt bekanntlich zuletzt. Am Transistor T4 war noch soviel Platz, um einen ersten 100 Ω Widerstand einzubauen. Und der genügte bereits, die Schwingneigung war verschwunden. Danke, Dieter!
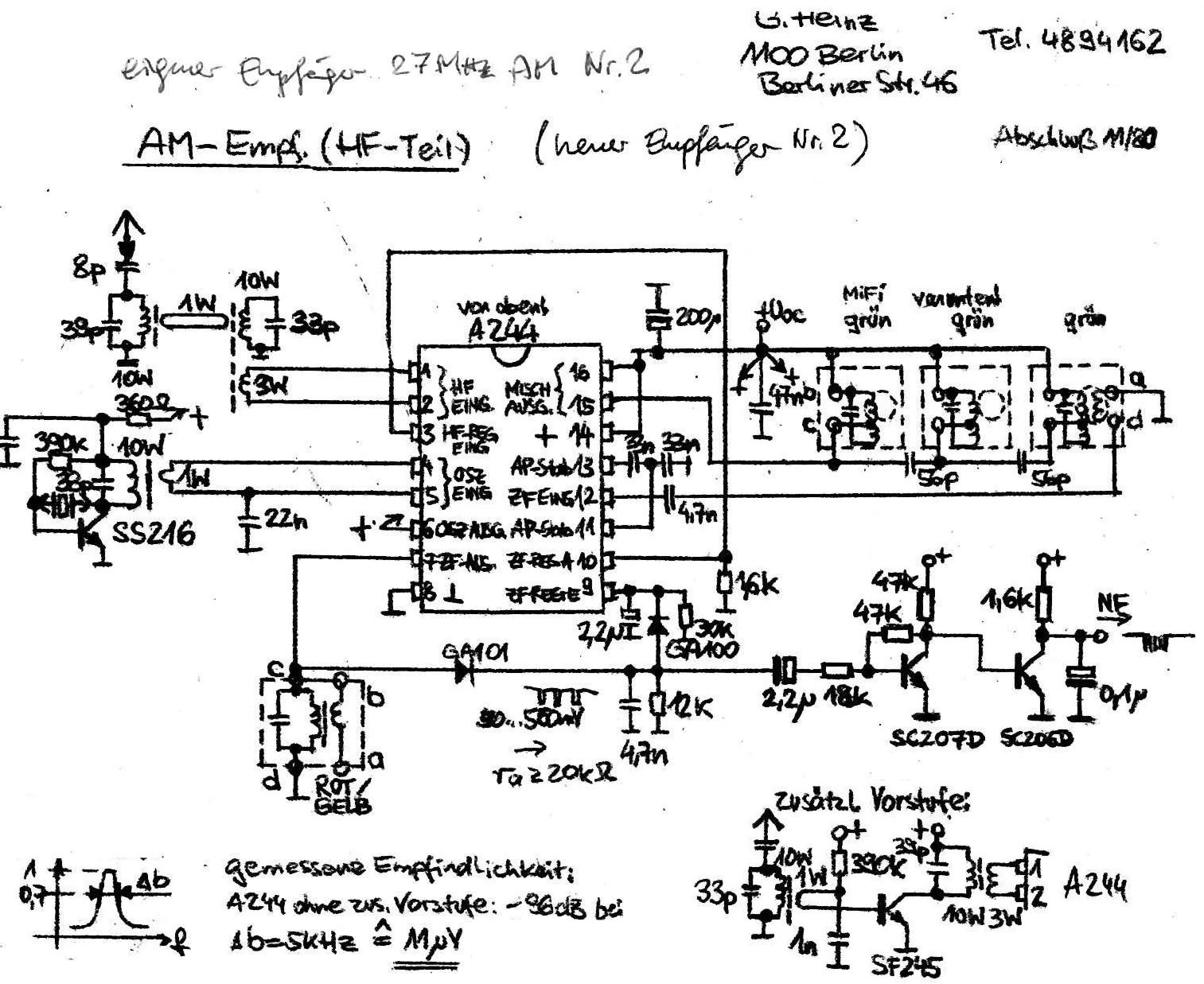
Passend zum Sender wurde ein für damalige Verhältnisse sehr kompakter 8-Kanal AM-Empfänger mit ZF 455 kHz und ersten ICs gebaut, diesmal mit vier Mikki-Filtern. Eigentlich sollte ein Piezo-Filter genutzt werden, aber das war wohl noch nicht beschaffbar. Auch war unklar, ob die Frequenztoleranz verfügbarer Piezofilter (455 kHz) zur Toleranz der Quarzpaare passen würde. Dazu lagen damals keine Erfahrungen vor.
Im Vergleich zum ersten Empfänger verlief der Bau problemlos. Man hatte gelernt.
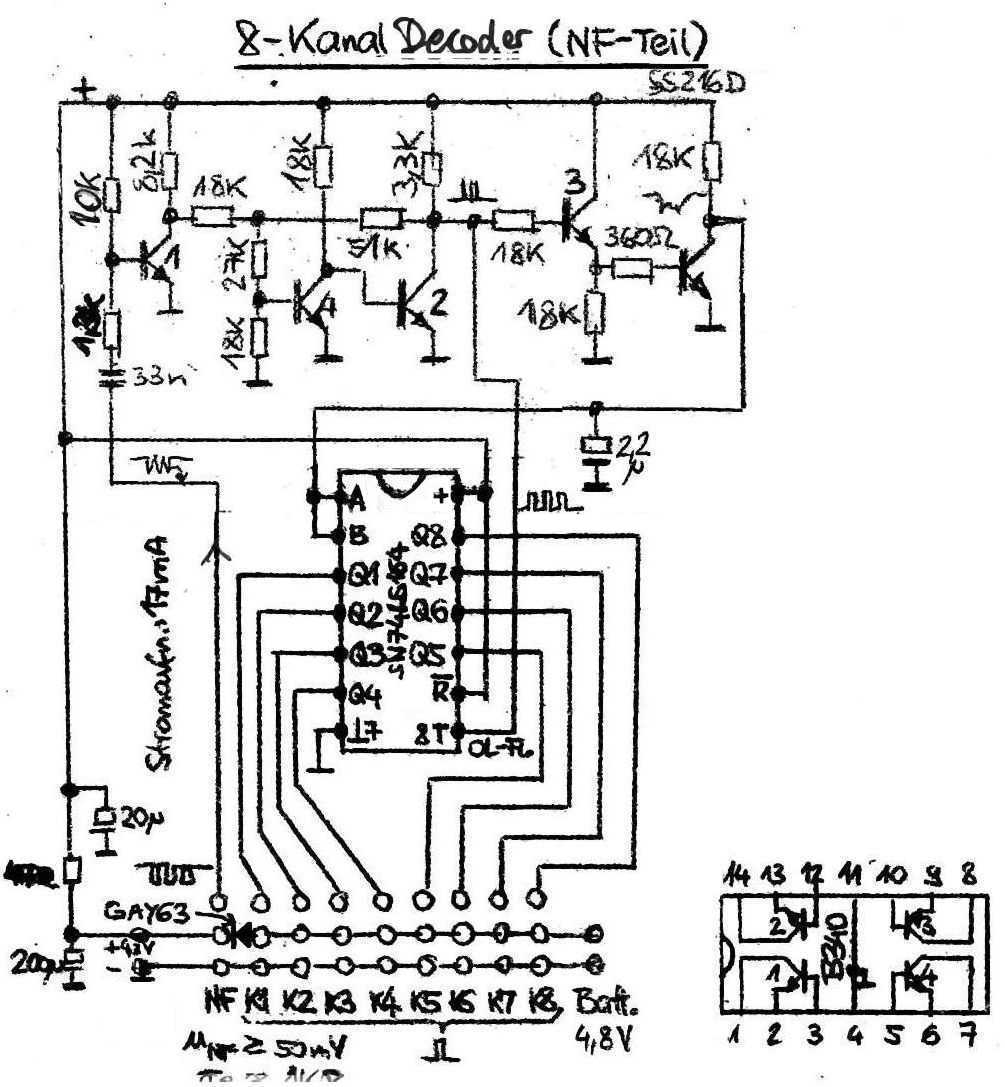
Im Miel fanden sich Schaltpläne, vom A244 (alias TCA440) gab es Applikationsnoten etc. Man konnte die Varianten heraussuchen, die zum eigenen Material und zu den eigenen Anforderungen am besten paßten. Das Transistorarray B340 und das serielle Schieberegister SN74LS164 (8-bit parallel-out, serial shift register) fanden sich sicher im Institut, den A244 zu besorgen war etwas schwieriger. Mit dem Schieberegister-IC konnte mühelos ein für damalige DDR-Verhältnisse winziger 8-Kanal Dekoder aufgebaut werden.
Eine neue Zeit brach an. Der 8-Kanal-Empfänger in einem Gehäuse war wohl als Quantensprung zu bezeichnen. Er kam klein und kompakt ohne ein überflüssiges Kabel daher. Die HF-Platine befand sich im zusammengelöteten Messingblech-Gehäuse oberhalb der Decoderplatine, beide waren gegeneinander durch hydrophoben Schaumstoff isoliert.
An dem mit "NF" bezeichneten Pin geht die invertierte Pulsfolge des Empfängers (Pulse sind LOW) ein. Die Pulse werden mit T1, T4 und T2 verstärkt, begrenzt und invertiert. Als TTL-Pegel werden sie an den Takteingang (T bzw. CLK) des 8-Bit serial_in parallel_out Schieberegisters SN74LS164 geführt. T3 und der Folgetransistor (SS216) sorgen während der Ankunft der Pulse für einen LOW-Pegel an den Eingängen A und B des Schieberegisters. War der Kondensator 2,2µF bei Ankunft des ersten Pulses noch auf HIGH geladen, so schieben jetzt die fortfolgenden Pulse der Kanäle am Takteingang diese Eins über die Ausgänge Q1 bis Q7 weiter. Der /RESET-Eingang (/R) bleibt permanent ungenutzt auf HIGH.
Das Layout der Schaltung war einlagig. So konnte auch diese Platine selbst geätzt werden. Nur zwei Drahtbrücken waren in die Platine einzulöten.
Der Empfänger kam zum ersten mal in der Rennsaison 1981 zum Einsatz. Gegenüber dem ersten Empfänger war es eine Wohltat, damit zu arbeiten. Um vor Vibrationen zu schützen, wurden auch diese Platinen mit Kerzenwachs vergossen.
Wachs hat den Vorzug, daß es sich verflüchtigt, sobald man mit dem Lötkolben eine Leitbahn erhitzt. Das ist wichtig, um Reparaturen ausführen zu können. Man kann das Wachs leicht entfernen, indem man den Empfänger auf ein Tempo-Taschentuch in ein Gefäß legt und das Ganze im kochenden Wasserbad erhitzt.
Die Platinengröße des HF-Teils, wie auch der elektrische Anschluß waren zum ersten Empfänger kompatibel. Damit konnte man beide HF-Teile gegeneinander austauschen, siehe Foto rechts in Bild 6.
Ein Novum waren beim 8-Kanal-Decoder des zweiten Empfängers die neuen Steckverbinder. Buchsen und Stecker wurden aus einem 87-poligen Leiterplattensteckverbinder-Paar (dreireihige Buchsenleiste am Decoder und dreireihige Stecker an Servos, Emfänger und Akkuleitung) mit der Laubsäge ausgesägt und flach gefeilt - eine Strafarbeit. Geeignete Stecker und Buchsen gab es in der DDR nicht.
Mangelwirtschaft eben, man hatte ja sonst nichts zu tun. Das waren die echten Vorzüge des Sozialismus. Seitdem mochte ich keine Ismen mehr. Es hat bei mir sehr lange gedauert, bis ich begriff, daß die Erfinder und Einpeitscher von Ismen oft noch nicht einmal ahnen, worüber sie reden.(Bei einem Flugzeug reden wir zum Beispiel über eine halbe Million verbauter Bauteile. Weisen sie mal für jedes Bauteil entsprechend dem neuen "Lieferkettengesetz" vom 11. Juni 2021 die Sorgfaltspflicht nach: Dieses Gesetz ist der Todesstoß für high-tech Firmen mit über 1000 Mitarbeitern in Deutschland. Sie werden das Land verlassen, oder untergehen.)
Industrie ist so irrsinnig komplex, daß sie von einem (Staats-) Monopol nicht effizient dirigiert werden kann, das ist wohl die wichtigste Lehre aus dem gescheiterten, "realen" Sozialismus. Die industrieelle Entwicklung liebt die Freiheit des Denkens und Handelns, sie lebt davon.
Wer heute noch von Oligarchen oder Staatsmonopolen träumt und glaubt, daß sie irgend etwas zum positiven verbessern könnten, der wird ernüchtert erwachen. Insofern hätten Anti-Trust-Behörden die wichtigste Aufgabe überhaupt: Monopolbildung zu verhindern. Auch Staatsmonopol ist ein Monopol, das gefährlichste überhaupt.
Leider erleben wir seit 2020 schon wieder Tendenzen, dies zu vergessen (2024). Der argentinische Staatspräsident Milei meint dazu: "Der Staat ist nicht die Lösung, er ist das Problem!"
Leider waren die querliegenden Kontaktstifte der Stecker trotz gleichem Rastermaß nicht mit den Buchsen westlicher Empfänger kompatibel. Buchsenleiste und ein daraus gefeilter Stecker sind in Bild 5c links zu erkennen.

Für diesen Empfänger wurde ein Gehäuse aus 0,5 mm dickem Messingblech angefertigt. Das hatte den Nachteil, daß man die Spulen der Filter (27 MHz und 455 kHz) nach dem Einbau leicht nachtrimmen mußte. Dazu hatte der Blechdeckel Löcher über den Spulen. Abschließend wurde ein Messingblech darüber gelötet.
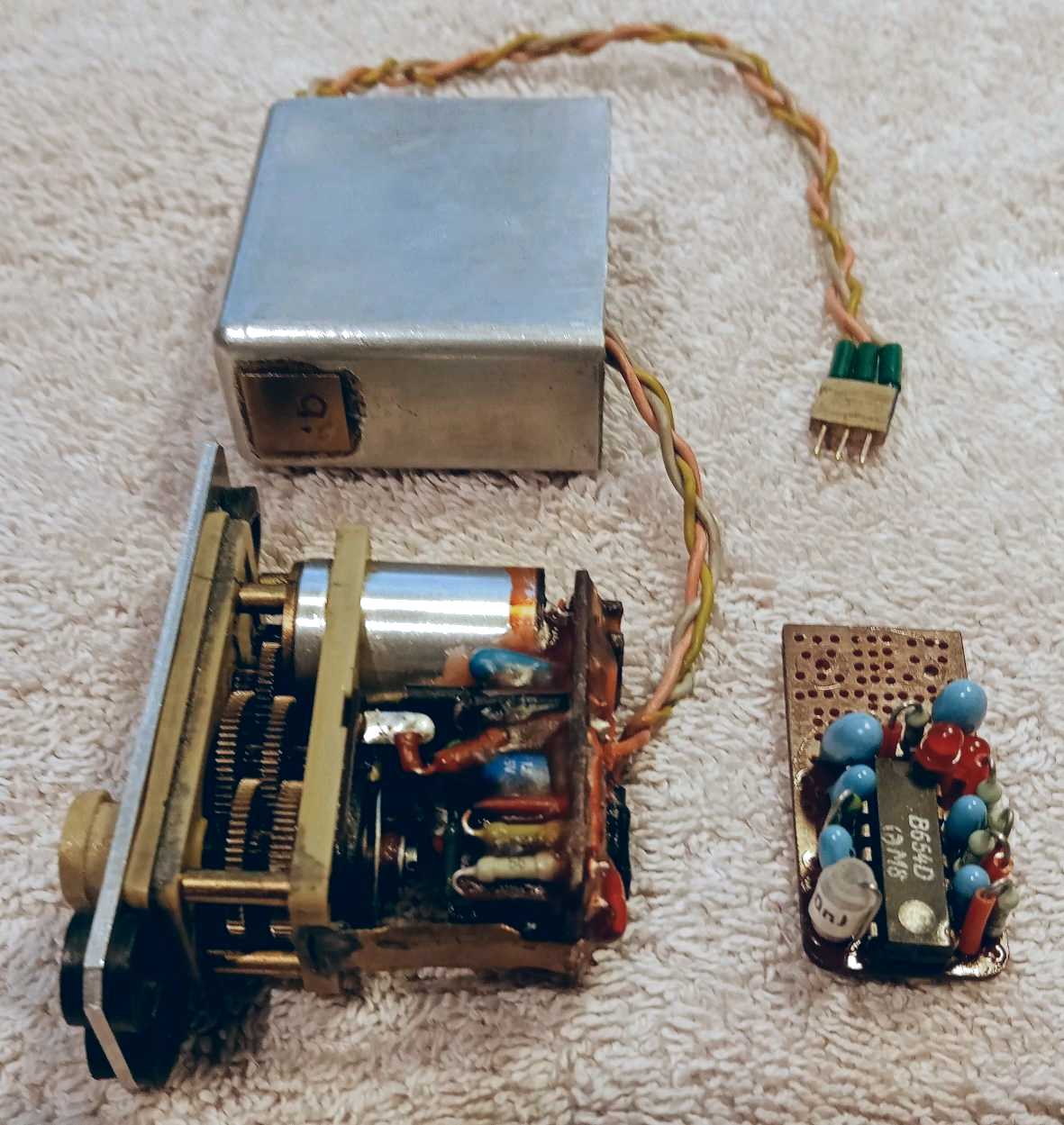
7: Die integrierte Servo-Elektronik
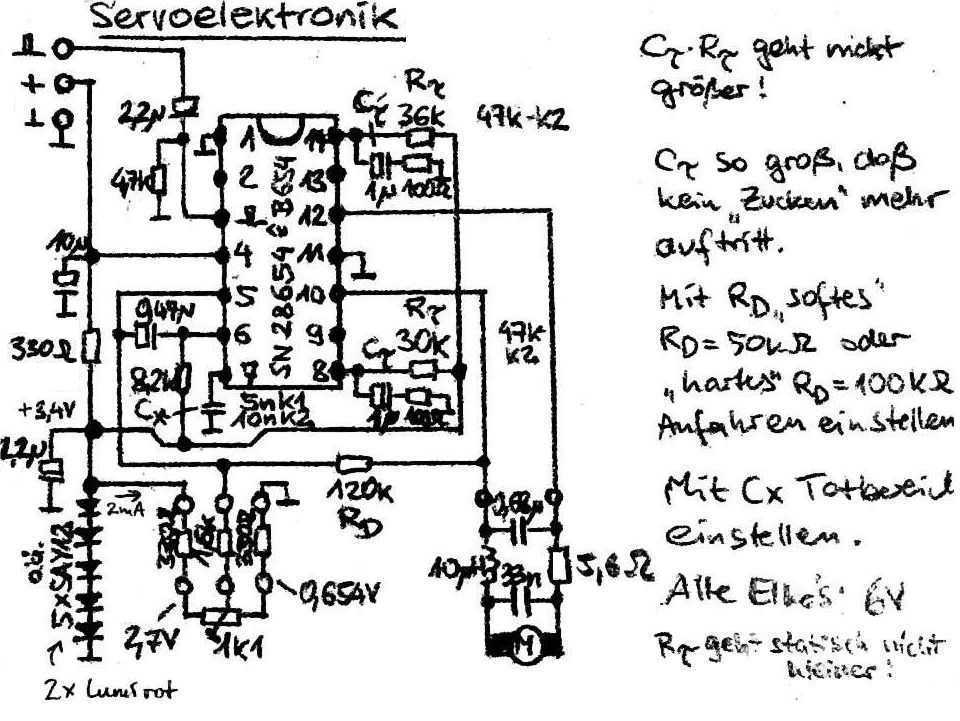
1980 kam eine selbstgebaute Elektronik in die Servos hinein. Es war ein Quantensprung! Die Motivation dahinter war gewaltig. Einerseits wurde im Ferrari Platz eingespart, andererseits aber arbeitete der SN28654 alias B654 mit einer Vollbrücke. Die Servomotoren liefen nun mit der doppelten Spannung, dadurch wurden sie schneller und stärker. Allerdings wurde ein 5,6 Ω Widerstand zur Strombegrenzung auf 500 mA erforderlich.
Im Halbleiterwerk Frankfurt/Oder (HFO) hatte man den Servo-IC SN28654 Pin- und Funktionskompatibel als B654 nachentwickelt. Da ich dort dienstlich mit der Überführung des ersten in Berlin entwickelten IC, des PCM-Regenerators KA601 [7] zu tun hatte, nahm ich Kontakt mit dem Entwickler im HFO auf. So konnte ich erste Exemplare besorgen. Der IC im Bild ist datiert auf M8 - August 1980, siehe Bild der Reserveplatine. Offenbar fuhr der Ferrari erst 1981 mit integrierter Servoelektronik, siehe auch [2] Seiten 350 ff..
Mit dem Servo-IC wurden zwei Probleme gelöst. Zum einen arbeitete der Servomotor nun in einer Vollbrücke mit annähernd voller Betriebsspannung, zum andern verschwanden die lästigen Kistchen und Kabel mit der Servoelektronik aus dem Modell. Durch die höhere Motorbetriebsspannung entfalteten die Servos mehr Kraft und mehr Geschwindigkeit.
Nun konnten bis zu acht Elektronik-Servos am gleichen Empfänger betrieben werden.
Ein Beschaffungsproblem bereiteten die sieben Elektrolyt- Kondensatoren pro Servoelektronik. Aus Platzgründen kamen nur Tantal-Pillen in Frage. Und die gab es aus DDR-Produktion noch nicht. Irgendwie konnten sie im Institut beschafft werden.
Ein Blick auf die Schaltung zeigt, daß der Wert verschiedener Bauelemente (Cx, Cτ, Rτ) variiert wurde, um die Regelschleife stabil zu bekommen. Auf der einen Seite ist Überschwingen zu vermeiden, auf der anderen Seite soll der Totbereich so klein wie möglich ausfallen, um hohe Stellgenauigkeit zu erreichen.
Sorgen bereiteten die geerdeten Gehäuse der Servos. Ab und an gab es metallische Berührungen zwischen Servo-Gestängeteilen, Servogehäuse und Chassis, die Funkstörungen verursachten, weil sich dann die Masseführung mehrfach änderte. Dieses Problem wurde im Ferrari durch Isolation der beweglichen Gestängeteile beseitigt.
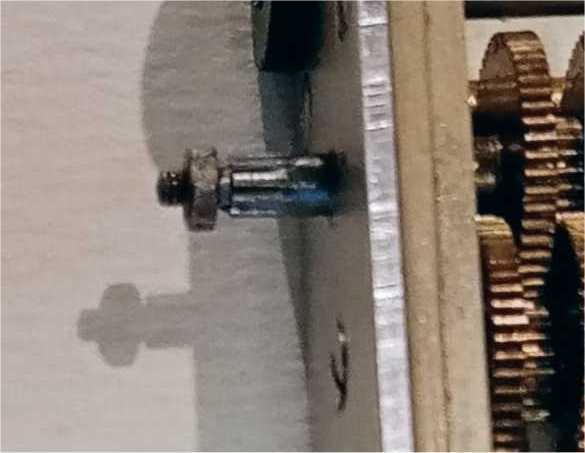
Die Besonderheiten der Rudermaschine bestanden in einer vergleichsweise hohen Übersetzung von 300:1, dem dadurch relativ hohen Drehmoment von 1,2 kpcm. Damit war es kaum möglich, den Abtrieb manuell zu bewegen. In Verbindung mit einer 3mm-Welle, die nur geriffelt ist, um die Ruderscheibe aus Plast zu drehen, war das die Schwachstelle der Rudermaschine; siehe Bild 8b).
Da bei Rennwagen immer die Gefahr von Unfällen besteht, bei denen meist die Vorderräder die größten Kräfte aufzunehmen haben, war ein Servoschutz der Lenkung unabdingbar. Um eine brauchbare Lösung zu finden, gab es etliche Versuche.
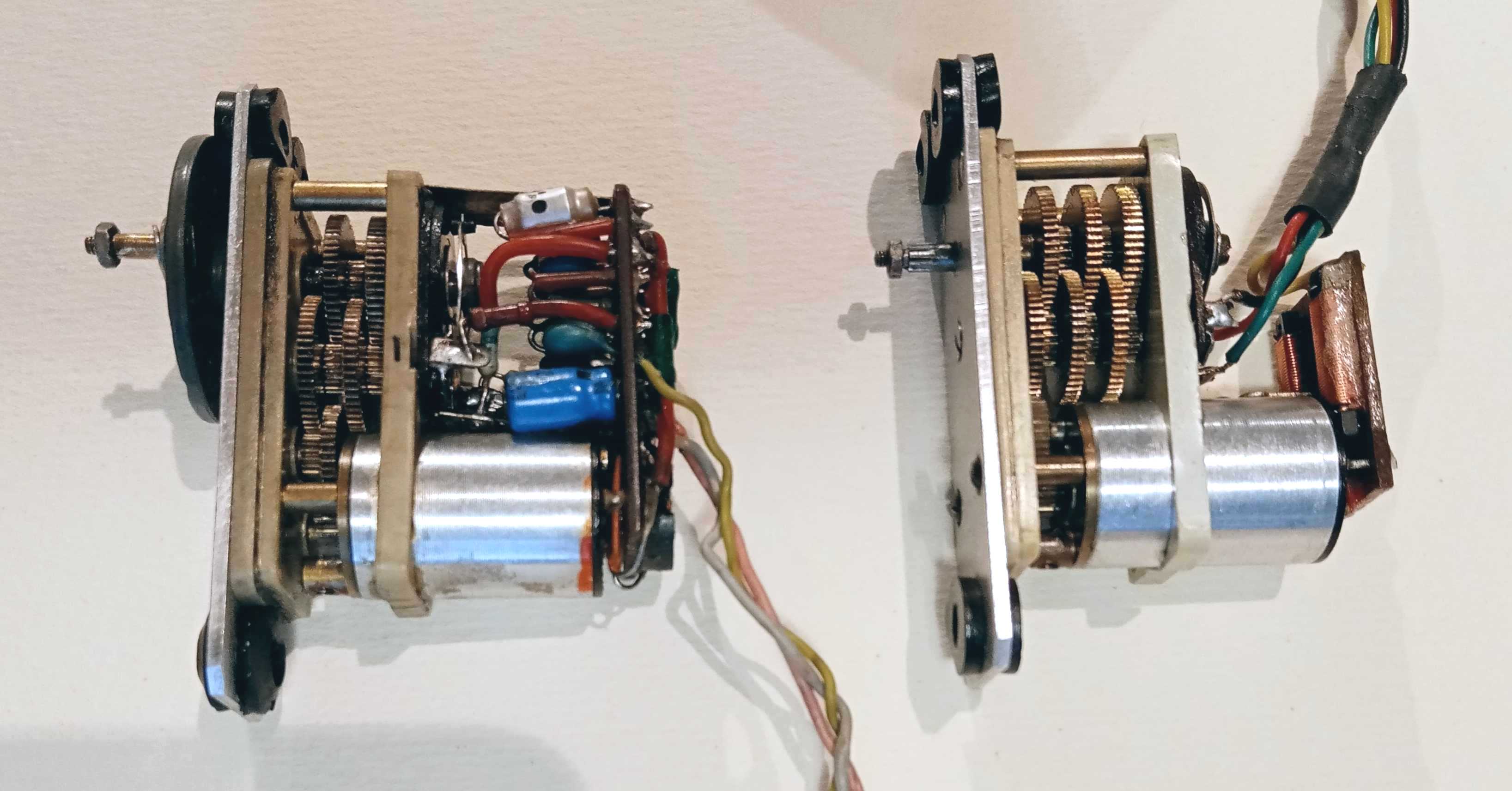
Im Bestand des Autors befinden sich drei verschiedene Versionen der Servomatik, Bild 8. Die erste Version hat die höchste Übersetzung, man erkennt 6 große Zahnradpaare aus Rad und Ritzel. Vermutlich ist das diejenige, zu der obiges Datenblatt gehörte. Dieses Servo blieb nur deshalb im Original erhalten, weil es sich nicht mit Elektronik nachrüsten ließ, der Platz fehlte.
Bild 8: Drei Varianten des Servos "Servomatic 15S": a) Rechts die erste Version mit Untersetzung 1:300, links die zweite, nachgrüstete Version mit 1:225. b) Die geriffelte 3mm-Welle greift direkt in die Ruderscheibe aus Plast. c) Die letzte Version mit dem Messing-Zahnrad auf der Vierkant-Welle war stabiler.
Spätere Versionen haben nur noch vier große und ein kleines Zahnradpaar, also vermutlich eine Übersetzung von etwa 1:225 (4,5/6 mal 300), siehe Bild 8a). Die letzte Version in Bild 8c) hat einen Vierkantabschluß der Welle, auf dem zusätzlich eine außen geriffelte Messing-Zwischenscheibe sitzt, die das Drehmoment besser an die Ruderscheibe überträgt. Im Ferrari wurde sie als Lenkservo eingebaut.
Erst im zweiten Quartal 1985 war der VEB Kfz.-Zubehör Reinhardtsgrimma, Hauptstr.42 dann in der Lage, mit der Serienproduktion eines ersten Servos mit Elektronik "Servomatic 16 IS" zu beginnen [10]. Es kostete 180 Mark (der DDR). Da gab es im Westen schon seit zehn Jahren elektronische Servos. Und ich hatte den Sport schon drei Jahre zuvor an den Nagel gehängt.
8. Rückbau der Fernsteuerung im Detail

(Ich schrieb 2021: Demnächst steht beim RC-Automodell des Ferrari 312T vielleicht ein Rückbau der Fernsteuerung auf den Stand von 1980 an. Hoffentlich sind irgendwo in den Weiten des Internet passende Servo-Potis zu finden. Zum Glück sind die meisten, alten Teile noch vorhanden.)
Es kostete einige Überwindung, die Servos anzufassen, um Reparaturmöglichkeiten zu erkunden. Es stimmte einiges nicht mehr. Bei einem Servo war der Totbereich größer, beim anderen kleiner geworden (es flatterte), der Nullpunkt hatte sich nach 40 Jahren stark verschoben, die Potis zeigten bei einigen Stellungen Aussetzer. Das Öl war verharzt, die Motoren liefen kaum noch an. Zum Glück aber waren die Servos mechanisch noch in Ordnung. Auch die Stellscheiben und Ruderhörner paßten noch. Sogar ein originales Lenkgestänge - selbstgelötet aus zwei auf einen Kabelschuh gelöteten M2-Muttern fand sich noch und wurde nachgebaut.
Die Aussetzer waren schnell beseitigt. Offenbar waren die Kontaktflächen mehrmals gereinigt worden. Dabei hatte die Spannkraft der inneren Federn nachgelassen, siehe Bild der Servomatik im Originalzustand ohne Elektronik. Vorsichtiges Nachbiegen und Reinigung der Kontaktfläche mit Alkohol half. Um Nullpunkt und Totbereich nachzukalibrieren, wurden einige Widerstände gewechselt. Nun laufen Gas- und Bremsservo wieder (fast) wie neu.
Dann mußte eine neue Elektronikplatte angefertigt werden. Die Originalplatte war nicht mehr vorhanden, wahrscheinlich war sie zu sperrig und flog nach dem Umbau 1992 in den Müll. Eine Zeichnung wurde angefertigt und das 0,8 mm Alublech wurde zugeschnitten. Nun hieß es, mit der Laubsäge die vielen, hochzubiegenden Laschen auszusägen. Nach Anprobe der Teile (zwei Servos, Empfänger, Akku, Schalter wurden noch die Löcher gebohrt und die Laschen hochgebogen.
Zum Schluß kamen die selbstgebauten Empfänger an die Reihe. Zunächst ging nichts. Die Stromaufnahme war zu hoch. Der Decoder zeigte einen 100 µF Frolyt-Elko, dessen weißes Plastgehäuse einen Millimeter über der Leiterplatte anfing. Der hatte sich aufgeblasen und wurde gewechselt. Dasselbe war beim Empfänger Nr.2 passiert. Auch hier wurde dieser Elko gewechselt. Damit gingen Decoder und Empfänger Nr.2 wieder! Juhu!
Beim Empfänger Nr.1 war mir das Glück nicht hold. Ich schaffte es in einer Woche nicht, ihn wieder zum Laufen zu bringen. Alle Arbeitspunkte stimmen, aber die drei ZF-Stufen dämpfen, statt zu verstärken. Als wären die Mikki-Filter massiv verstimmt. Da sie mit Wachs vergossen sind, gab ich auf. Ein funktionierender Empfänger muß reichen.
Blieb noch der Sender. Das Gehäuse war verbeult, gerissen und zerkratzt, es mußte mit Harz innerlich verklebt, gespachtelt und lackiert werden, das Alulot zerbröselte, die Potis waren verschlissen und zeigten Aussetzer. Flachbatterien sind kaum noch zu erhalten, so wurden zwei Akkus NiMH 4,8V/2400mAh eingesetzt. Eine Ladebuchse wurde nachgerüstet.
Die Sendeleistung war auf etwa 300 mW zurückgegangen (war leider nicht behebbar, ein Transistor mit höherer Stromverstärkung als die des Originals 2N2219 fand sich nicht). Dunkel erinnere ich mich, daß sie vor 40 Jahren bei 13,5 Volt (3 Flachbatterien in Reihe) bei annähernd einem Watt lag.
Schlußendlich bereitete die Trimm-Mechanik der Lenkung Probleme, ein Trimmpoti wurde gewechselt.
Dann waren noch die anderen Potis zu reinigen, für die es keinen Ersatz gab. Aber zum Glück waren die Gehäuse nicht vernietet oder verschweißt, sondern nur gebördelt. Nach zwei Wochen Arbeit war auch der Sender wieder funktionstüchtig.
Schlußendlich erfolgte noch ein Reichweitentest.
9. Reichweitentest
Am Vorderrad des Ferrari wurde ein etwa 16x8 cm langer, weißer Pappstreifen als Fähnchen befestigt. Das Modell wurde auf dem Gehweg in etwa einem Meter Entfernung zum Zaun in Fahrtrichtung zum Sender platziert.
Mit dem Sender in der Hand ging es dann auf dem Gehweg die Straße entlang. Partielle Reflektionen an Zäunen der Nachbarn (und damit verbundene Auslöschungen) wurden bewußt in Kauf genommen. Autos parkten nicht am Gehweg. Der gegenüberliegende Zaun steht rund 7 bis 8 Meter entfernt. Beidseitige Bordsteinkanten sind ca. 10 Zentimeter hoch.
Die restaurierte Fernsteuerung mit Empfänger 2 kam bei einer Betriebsspannung von 10,5 Volt (8 NiMH Zellen in Reihe) rund 40 Meter weit. Eine gekaufte Acoms 27-MHz AM-Fernsteuerung aus der Zeit um 1992 schnitt mit 30 Metern bei 12 Volt schlechter ab (8 Batterien AA/LR6 in Reihe).
Überraschend viel besser schnitten preiswerte 2,4 GHz-Fernsteuerungen mit FHSS ab.
Eine Tamiya-Carson "Reflex-Wheel Pro LCD" (mit 6 Volt; 4 AA-Batterien in Reihe) damals um 90 Euro) brachte es ebenso wie ihr noch preiswerteres Einstiegsmodell Tamiya-Carson "Reflex-Wheel Start" (mit 6 Volt; 4 AAA-Batterien in Reihe, um 30 Euro) mühelos auf über 100 Meter. Dort ist die Straße zu Ende. Auch ist dort die Lenkbewegung der Vorderräder nicht mehr klar zu erkennen. Bis zum Straßenende waren keinerlei Fehlfunktionen, wie Aussetzer oder Wackeln, zu bemerken.
Damit ist klar: wenn der Ferrari noch einmal fährt, dann besser mit der 2,4 GHz Fernsteuerung "Reflex-Wheel Pro LCD" mit FailSave (F/S) Funktion im Empfänger. Ein entsprechender Stecker-Adapter für den Empfänger wurde gebaut, um die alten Eigenbau-Servostecker mit den genormten Tamiya-Stiften des Empfängers verbinden zu können.
Eines der weltweit letzten, verbliebenen Funkfernsteuerungen und RC-Automodelle aus der "Gründerzeit" ist nach 40 Jahren wieder auferstanden. Nun gilt es, die Komponenten so zu verpacken und einzulagern, daß sie die nächsten 2000 Jahre überstehen können. Bleibt die große Frage, ob die Elektronikkomponenten so lange überleben werden. Wohl kaum? Drücken wir uns die Daumen!
Demnächst kommt die Stunde der Wahrheit: Wird alles noch auf der Piste funktionieren?
Bliebe noch festzustellen, daß sich die Servo-Schnittstelle mit Pulsweitenmodulation (PWM) in 60 Jahren kaum verändert hat. Auch das Regelungsprinzip blieb erhalten, egal, ob bei analogen Servos (die heute ausgestorben sind) und die mit RC-Gliedern arbeiteten, oder bei digitalen Servos, bei denen mit Zählerschaltungen oder Mikrocontrollern die Zeit gemessen wird.
Natürlich sind die Servos über die Jahre schneller und kräftiger geworden, Neodym-Magnete der Motoren machten es möglich. Eine ebenso wichtige Neuerung sind Servos mit höheren Betriebsspannungen (Hochvolt- oder HV-Servos), die sich an 8,4 Volt (zwei LiPo-Zellen in Reihe) ohne BEC (Battery Eliminator Circuit) anschließen lassen.
Zwei Neuerungen allerdings lassen noch auf sich warten. Der Lebenszyklus eines Servos ist beendet, wenn abgebrannte Motorkohlen oder eine abgeschliffene Poti-Bahn zu Stottereien führen. Brushless-Motoren wären zuverlässiger, ebenso ist ein Poti-Ersatz durch einen magnetischen Drehfeldsensor mit 12 Bit Auflösung denkbar. Aber das ist wohl nur eine Frage nach der Amortisation der Entwicklungskosten eines Semicustom-IC.
[1] Hennicke, Lothar: RC-Flugmodelle und RC-Modellflug. VEB transpress-Verlag für Verkehrswesen, Berlin, 1977, 4,80 Mark, 112 S.
[2] Miel, Günter: Elektronische Modellfernsteuerung. (Kompendium). Militärverlag der DDR, Zweite Auflage 1978, 12,80 Mark, 416 S.
[3] Kühn, Eberhard; Schmied, Horst: Handbuch integrierte Schaltkreise. VEB Verlag Technik Berlin, 2. Auflage 1980, 32,- Mark, 384 S.
[4] H. R. Everett, Unmanned Systems of World Wars I and II, MIT Press - 2015, pages 79-80 (Bezugnahme auf eine Drahtfernsteuerung von Werner von Siemens, 1870)
[5] Tesla, Nikola: Method and Apparatus for controlling mechanism of moving vessels or vehicles. US-Patent 613809 vom 8.11.1898, 13 Seiten. Download as (PDF). Ein Bild davon ist hier zu finden (Link)
[6] Forum: Early digital-proportional history. (Link)
[7] Heinz, Gerd: Digitalisierung des Telefons: Erste, integrierte Schaltkreise (IC) aus Ost-Berlin (Link)
[8] Wikipedia: "Funkfernsteuerung" Kap.3.1.4, Analoge AM- / FM-Proportionalsteuerung 27 MHz bis 40 MHz (Link)
[9] B654-Datenblatt nach "Aktive elektronische Bauelemente". Teil 1, S.129f. Redaktionsschluß Nov.1987. VEB Kombinat Mikroelektronik, Rudolfstr.47, 5010 Erfurt (PDF)
[10] Borrmann, G.: Rudermaschine Servomatic 16 IS. Modellbau heute, mbh 5'85, Seite 19 (PDF)
nach oben
weiter zum RC-V1-Renner
Kommentare, Hinweise oder Tips bitte an info@gheinz.de
Besucher auf www.gheinz.de seit dem 6.12.2021:








{kind=link}